جهان امروز صنعت و فناوری به حرکاتی نیاز دارد که نه تنها قدرتمند باشند، بلکه از نظر موقعیت، سرعت و شتاب نیز با دقتی بینظیر قابل کنترل باشند. در این میان، سروو موتور ها به عنوان یکی از مهمترین و پیچیدهترین اجزای تجهیزات اتوماسیون و کنترل صنعتی، نقش محوری در تحقق بخشیدن به این الزامات ایفا میکنند. سامانههای سروو، مجموعهای هوشمند از تجهیزات الکترومکانیکی هستند که توانایی اجرای دستورات کنترلی را با وفاداری بسیار بالا دارند و در هر صنعتی که دقت عملکرد، حرف اول را میزند، حضوری پررنگ دارند.
درک عمیق از این فناوری برای هر متخصص اتوماسیون ضروری است، زیرا فروش الکتروموتور به تنهایی کفایت نمیکند و شناخت تفاوتهای عملکردی در انتخاب یک سیستم بهینه، کلید موفقیت محسوب میشود.
سروو موتور چیست و چگونه کار میکند؟ سروو موتور به زبان ساده چیست؟
سروو موتور در حقیقت یک موتور الکتریکی تنها نیست، بلکه یک سیستم کنترل حرکت کامل است که برای مدیریت دقیق موقعیت زاویهای، سرعت و گشتاور طراحی شده است. این سیستم قابلیت فرمانپذیری کامل در برابر سیگنالهای ورودی را فراهم میآورد و برخلاف موتورهای ساده، به طور مستمر وضعیت خروجی خود را پایش و تصحیح میکند. مفهوم بنیادی سروو موتور، کنترل حلقه بسته است که دقت بیمانندی را تضمین میکند. حتی برخی ویژگی ها و قابلیت های این موتور با خرید قطعات الکترونیکی درست و نصب صحیح آنها قابل شخصی سازی است.
مفهوم فیدبک و کنترل حلقه بسته در سروو موتور:
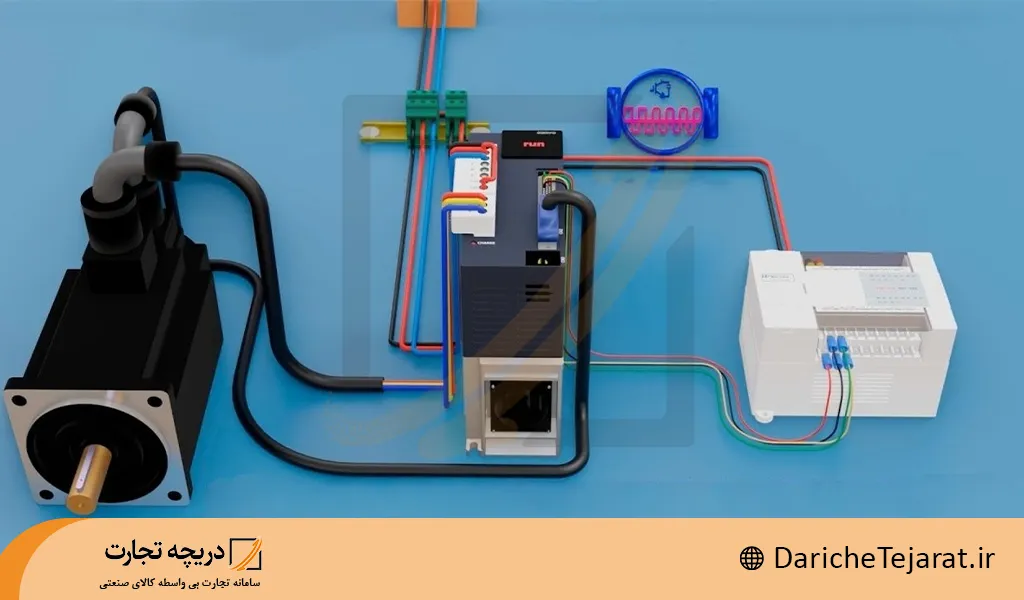
سیستم سروو، موقعیت موتور را توسط انکودر اندازهگیری کرده و به عنوان فیدبک به درایور بازمیگرداند. درایور این موقعیت واقعی را با موقعیت دستوری مقایسه میکند و هرگونه اختلاف یا خطا را شناسایی مینماید. سپس جریان لازم را به موتور اعمال میکند تا خطا به سمت صفر میل کند. این فرآیند دایرهای، سروو موتور را در برابر بارهای متغیر مقاوم میسازد. حتی واحد های صنعتی که ماشین آلات آنها با تجهیزات برق صنعتی کار میکنند به راحتی میتوانند از این نوع موتور ها بهره ببرند.
تفاوت موتور DC معمولی با سروو موتور
موتور DC معمولی یک سیستم حلقه باز است که عملکرد آن به نوسانات بار یا ولتاژ حساس است و هیچ اطلاعی از رسیدن به موقعیت هدف ندارد. اما سروو موتور با اتکا به انکودر و حلقه بسته، همواره از وضعیت لحظهای روتور آگاه است و خطا را فوراً تصحیح مینماید.
اجزای اصلی سروو موتور:
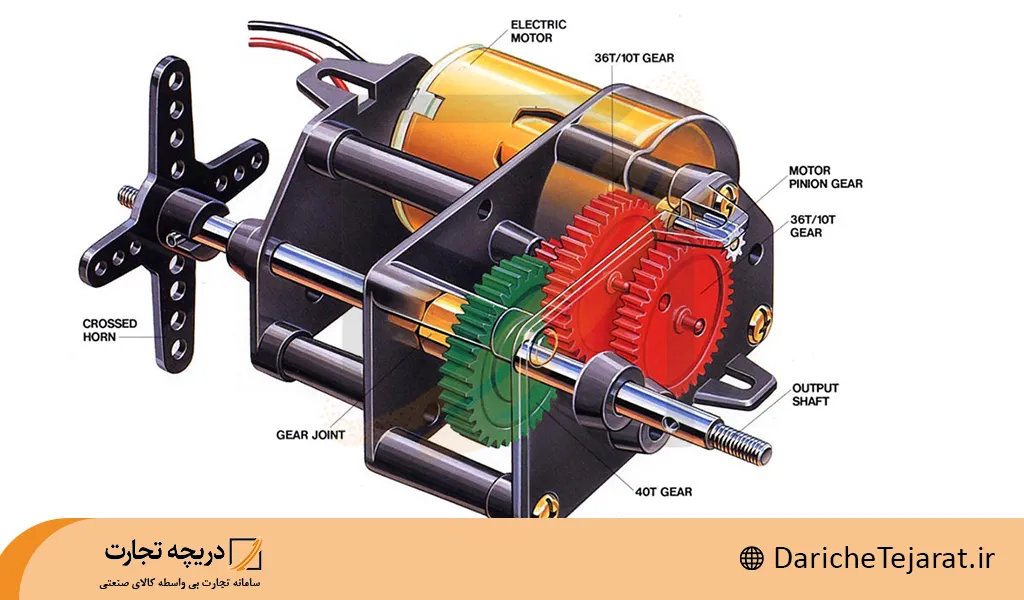
این سیستم از موتور (تبدیل انرژی الکتریکی به حرکت)، درایور (محاسبه خطا و تأمین جریان قدرت)، انکودر (سنسور فیدبک موقعیت و سرعت)، و سیستم کنترل (تولید دستورات حرکت سطح بالا با میکروکنترلر) تشکیل شده است.
ساختار و اجزای داخلی سروو موتور
بررسی ساختار داخلی سروو موتور به درک عمیقتر قابلیتهای دینامیکی و کنترلی آن کمک میکند. ساختار سروو موتور را میتوان به دو بخش مکانیکی برای تولید حرکت و بخش الکترونیکی برای مدیریت هوشمند آن تقسیم کرد. اجزای مکانیکی و الکترونیکی به صورت هماهنگ کار میکنند تا دقت و سرعت بالا در حرکت تضمین شود:
بخش مکانیکی مثل روتور و استاتور:
استاتور شامل سیمپیچهایی است که میدان مغناطیسی ایجاد میکنند. روتور، که معمولاً از مگنت دائم ساخته میشود، برای دستیابی به چگالی گشتاور بالا و اینرسی پایین طراحی شده تا موتور بتواند با سرعت زیاد شتاب گرفته و ترمز کند.
نقش انکودر در عملکرد دقیق سروو موتور:
انکودر حیاتیترین بخش فیدبک است که حرکت مکانیکی روتور را به سیگنالهای الکتریکی دقیق تبدیل میکند. این سنسورها (مانند انکودرهای مطلق یا افزایشی) اندازهگیری دقیق موقعیت و سرعت را فراهم میکنند که برای محاسبات حلقه بسته درایور الزامی است. میتوانید با خرید انکودر های بهتر و نصب تخصصی آنها، دقت دستگاه را افزایش دهید.
بخش الکترونیکی مثل درایو و کنترلر:
درایو سروو وظیفه دریافت سیگنالهای کنترلی از کنترلر و تولید جریان پرقدرت برای موتور را بر عهده دارد. کنترلر حرکت (مانند سیستم PLC)، دستورات سطح بالا را تولید میکند و پروفایلهای حرکت مورد نیاز را مدیریت مینماید. خرید تجهیزات اتوماسیون و کنترل مناسب، برای ایجاد ارتباط پرسرعت و دقیق بین این دو جزء ضروری است.
ارتباط بین درایو و کنترلر در سیستم سروو:
این ارتباط شامل ارسال دستورات حرکتی توسط کنترلر به درایو و انتقال اطلاعات وضعیت لحظهای موتور (فیدبک، خطاها و دما) از درایو به کنترلر است که از طریق شبکههای صنعتی پرسرعت انجام میشود. این شبکه ها با خرید انواع سیم و کابل مناسب ساخته و به هم متصل میشوند.
تفاوت بین سروو موتور و استپر موتور، القایی سه فاز، موتور سنکرون و آسنکرون
انتخاب صحیح و خرید موتور الکتریکی مناسب در صنعت مستلزم درک تمایزهای کلیدی در نوع کنترل، دقت، و مشخصات عملکردی آنها است. سروو موتورها در مقایسه با سایر موتورهای پرکاربرد، مزایای خاصی را ارائه میدهند که آنها را برای کاربردهای دینامیک بالا مناسب میسازد. تفاوتهای اصلی سروو موتور با سایر انواع موتورها در این موارد خلاصه میشود:
1. حلقه باز در مقابل حلقه بسته:
استپر موتورها و موتورهای القایی سه فاز معمولاً در حالت حلقه باز عمل میکنند. در حالی که سروو موتورها به دلیل وجود فیدبک، با حلقه بسته کار میکنند. این تفاوت، دلیل اصلی برتری سروو در دقت و پاسخگویی به تغییرات بار است. در استپر موتور، در صورت بار زیاد، موتور گام گم میکند و موقعیت واقعی خود را از دست میدهد، اما سروو موتور با افزایش گشتاور، موقعیت خود را حفظ مینماید.
2. دقت و گشتاور:
سروو موتورها دقت موقعیتیابی بسیار بالا و قابلیت حفظ گشتاور بالا در سرعتهای زیاد را دارند. استپر موتورها در سرعتهای بالا با افت شدید گشتاور مواجه میشوند و موتورهای القایی بیشتر برای حرکت پیوسته و سرعت ثابت طراحی شدهاند.
3. هزینه و پیچیدگی:
هزینه سروو سیستمها به دلیل انکودر دقیق و درایور پیچیده بالاتر است، در حالی که موتورهای القایی هزینه پایینتر و سادگی بیشتری دارند. خرید تجهیزات صنعتی مرتبط با سروو، یک سرمایهگذاری برای دقت و قابلیت اطمینان سیستم است.
جدول مقایسه عملکردی موتورها
| معیار | سروو موتور | استپر موتور | موتور القایی (آسنکرون) |
| دقت و دینامیک | بسیار بالا، پاسخ سریع | متوسط، پاسخ کند در سرعتهای بالا | پایین (موقعیتیابی)، مناسب سرعت ثابت |
| گشتاور در سرعت بالا | حفظ گشتاور بالا | کاهش شدید گشتاور | گشتاور تقریباً ثابت در محدوده سرعت کاری |
| نوع کنترل | حلقه بسته | معمولاً حلقه باز | حلقه باز یا کنترل سرعت (VFD) |
| نویز و لرزش | نویز کم، حرکت نرم | لرزش محسوس در سرعتهای پایین | نویز کم، در حالت کار پیوسته |
انواع سروو موتور
سروو موتورها بر اساس نوع جریان تغذیه و ساختار داخلی به چند دسته اصلی تقسیم میشوند که هر کدام برای کاربردهای مشخصی در صنعت بهینهسازی شدهاند.
سروو موتور AC چیست و چه ویژگیهایی دارد؟
سروو موتورهای AC پرکاربردترین نوع در صنعت هستند و معمولاً از موتورهای سنکرون مغناطیس دائم براشلس استفاده میکنند. ویژگی برجسته آنها چگالی توان بالا، اینرسی پایین روتور و عملکرد بسیار روان است که برای کاربردهای دینامیکی سنگین مانند رباتیک، CNC و بورینگ ایدهآل هستند. اما بورینگ چیست؟ سوراخ زدن با استفاده از سیستم های CNC با دقت بسیار بالا را بورینگ میگویند.
سروو موتور DC چیست و چه زمانی استفاده میشود؟
سروو موتورهای DC اغلب در توانهای پایینتر و سیستمهای سادهتر استفاده میشوند. این نوع میتوانند براش یا براشلس باشند. مدلهای براش به دلیل سایش مکانیکی نیاز به نگهداری بیشتری دارند و در کاربردهای کوچکتر یا مدلسازی به کار میروند، اما مدلهای براشلس DC از نظر عمر و نگهداری مزایای سروو AC را دارند.
به نقل از geeksforgeeks.org :
This motor allows precise control of speed and position. To set the desired output, a DC reference voltage is determined using a potentiometer, pulse converter, or timers. In digital control, microprocessors generate PWM pulses for accuracy. Feedback, obtained through a potentiometer, guides an error amplifier, ensuring precise motor positioning. The amplifier compares current and desired positions, generating an error voltage that powers the motor until the error is zero, facilitating accurate rotation.
Essentially, these motors are two-phase induction motors, featuring specific design distinctions. They produce mechanical power ranging from a few watts to several hundred watts, operating within a frequency range of 50 to 400 Hz. What sets them apart is their utilization of a closed-loop control system, employing encoders to monitor speed and position. This feature makes these motors exceptionally adept at precision and control, distinguishing them from others lacking such an advanced feedback system.
این موتور امکان کنترل دقیق سرعت و موقعیت را فراهم میکند. برای تنظیم خروجی مورد نظر، یک ولتاژ مرجع DC با استفاده از یک پتانسیومتر، مبدل پالس یا تایمر تعیین میشود. در کنترل دیجیتال، ریزپردازندهها پالسهای PWM را برای دقت تولید میکنند. بازخورد، که از طریق یک پتانسیومتر به دست میآید، یک تقویتکننده خطا را هدایت میکند و موقعیتیابی دقیق موتور را تضمین میکند. تقویتکننده موقعیتهای فعلی و مطلوب را مقایسه میکند و یک ولتاژ خطا تولید میکند که موتور را تا زمانی که خطا صفر شود، تغذیه میکند و چرخش دقیق را تسهیل میکند.
اساساً، این موتورها، موتورهای القایی دو فاز هستند که دارای تفاوتهای طراحی خاصی میباشند. آنها توان مکانیکی از چند وات تا چند صد وات تولید میکنند و در محدوده فرکانسی ۵۰ تا ۴۰۰ هرتز کار میکنند. چیزی که آنها را متمایز میکند، استفاده از یک سیستم کنترل حلقه بسته است که از انکودرها برای نظارت بر سرعت و موقعیت استفاده میکند. این ویژگی باعث میشود که این موتورها به طور استثنایی در دقت و کنترل ماهر باشند و آنها را از سایر موتورهایی که فاقد چنین سیستم بازخورد پیشرفتهای هستند، متمایز میکند.
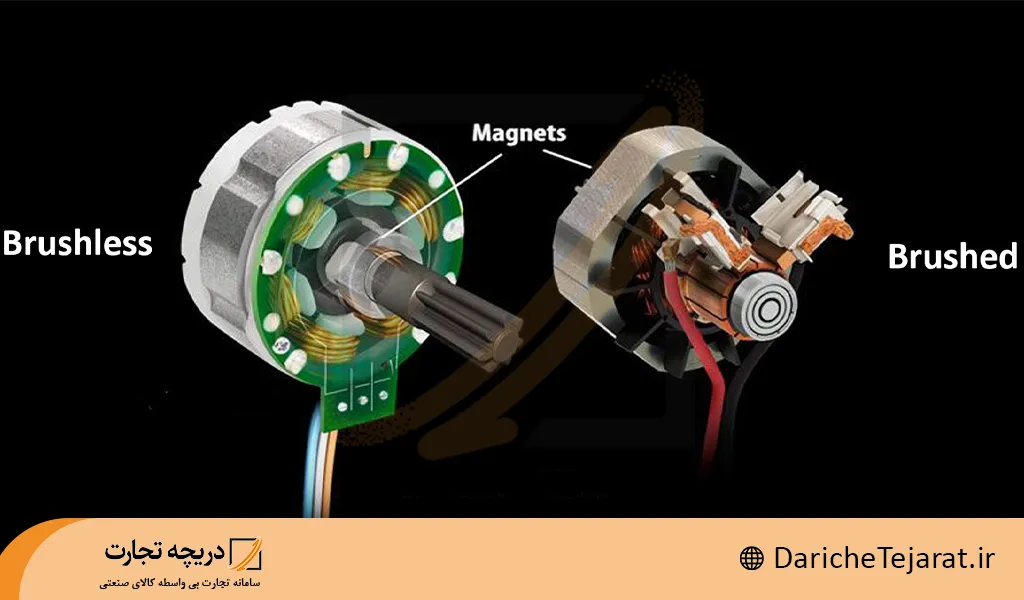
تفاوت سروو موتور براش و براشلس
تفاوت اصلی در نحوه کموتاسیون یا تغییر جهت جریان است. نوع براش این کار را مکانیکی انجام میدهد که منجر به سایش و جرقه میشود، در حالی که نوع براشلس کموتاسیون را به صورت الکترونیکی از طریق درایور انجام میدهد، که نتیجه آن عمر طولانیتر، سرعت بالاتر و نیاز به نگهداری کمتر است.
سروو موتور خطی چیست؟
این نوع مستقیماً حرکت خطی (مستقیم) تولید میکند و نیاز به واسطههای مکانیکی مانند بال اسکرو را از بین میبرد. سروو خطی از یک بخش اولیه (سیمپیچها) و یک بخش ثانویه (آهنرباها) تشکیل شده و به شتاب و دقت بینظیری (در حد میکرون) دست مییابد. خرید قطعات الکترونیکی و تجهیزات مرتبط با سروو خطی معمولاً برای صنایع با تکنولوژی پیشرفته ضروری است.
این جدول مقایسهای مشخصات کلیدی انواع سروو موتورها را برای انتخاب مناسب در فرآیندهای صنعتی مختلف ارائه میدهد.
| نوع سروو موتور | نوع جریان | دقت کنترلی | کاربرد | قیمت نسبی |
| سروو AC براشلس | متناوب (AC) | بسیار بالا | CNCهای پیشرفته، رباتیک صنعتی سنگین، ماشینابزارهای سرعت بالا | بالا |
| سروو DC براشلس | مستقیم (DC) | بالا | رباتیک متوسط، تجهیزات پزشکی، سیستمهای با توان متوسط | متوسط رو به بالا |
| سروو DC براش | مستقیم (DC) | متوسط | مدلسازی، اتوماسیون کوچک، کاربردهای کمتوان و کمهزینه | پایین |
| سروو موتور خطی | متناوب (AC) | بی نظیر (در حد میکرون) | ماشینهای مونتاژ تراشه، تجهیزات اپتیکی و لیزر، اندازهگیریهای دقیق | بسیار بالا |
کاربرد سروو موتور در صنایع مختلف
قابلیتهای کنترل دقیق سروو موتورها، آنها را به اجزای حیاتی در طیف گستردهای از کاربردهای صنعتی و تجاری تبدیل کرده است. این موتورها در هر زمینهای که نیاز به حرکت دقیق و با تکرارپذیری بالا باشد، نقشی اساسی ایفا میکنند. سروو موتورها امکان تحقق بخشیدن به حرکات پیچیده و دقیق را در موارد زیر فراهم میآورند:
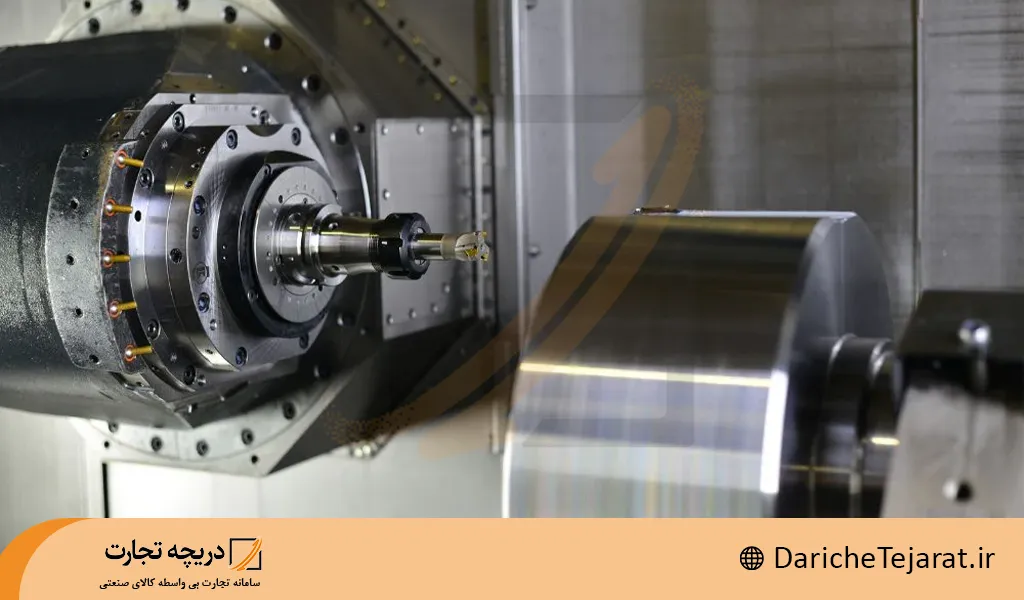
1. کاربرد در دستگاه CNC و ماشینابزار:
سروو موتورها نیروی محرکه لازم برای محورهای X, Y و Z در دستگاههای CNC را فراهم میکنند. آنها با شتابگیری و کاهش سرعت سریع و ردیابی دقیق کانتور، تولید قطعات با تلرانسهای بسیار کم را امکانپذیر میسازند و در واقع، ستون فقرات عملکردی ماشینابزارهای دقیق به شمار میروند. دستگاه cnc چیست؟ یکی از دقیق ترین و پرکاربرد ترین ماشین ابزار ها که انواع متریال ها را با دقت بسیار زیاد به اشکال گوناگون در می آورد.
2. استفاده در بازوهای رباتیک:
در هر مفصل از یک بازوی رباتیک، یک سروو موتور تعبیه شده است که وظیفه کنترل دقیق زاویه و سرعت مفصل را بر عهده دارد. این هماهنگی بین سرووهای چندگانه، به ربات اجازه میدهد تا وظایفی مانند جوشکاری یا مونتاژ را با دقت و سرعت انجام دهد.
3. در خطوط بستهبندی و صنایع غذایی:
در خطوط تولید انبوه، سروو موتورها برای همزمانسازی دقیق حرکت چند دستگاه، از جمله دستگاههای پرکن، دوخت و انواع دستگاه لیبل زن استفاده میشوند تا هر محصول در نقطه صحیح و با کمترین ضایعات پردازش شود.
4. در دربهای اتوماتیک، پله برقی و تجهیزات حملونقل:
در این نوع سیستم ها، سروو موتورها توقف نرم و دقیق در مقصد را تضمین میکنند، که ایمنی و راحتی را افزایش میدهد.
5. کاربرد در سیستمهای کنترل موقعیت:
هر سیستمی که نیاز به تغییر موقعیت از یک نقطه به نقطه دیگر با دقت بالا داشته باشد، مانند ردیابهای خورشیدی یا سیستمهای موقعیتیابی پزشکی، از سروو موتور استفاده میکند. فروش قطعات صنعتی مرتبط با سروو، مانند گیربکسهای دقیق، برای اطمینان از عملکرد بهینه در این سیستمها حیاتی است.
مزایا و معایب سروو موتور
با وجود تواناییهای بالای سروو موتورها، انتخاب آنها نیازمند ارزیابی دقیق مزایای عملکردی در برابر محدودیتهای مالی و فنی است. مزایای سروو موتورها از ماهیت حلقه بسته و طراحی دینامیک آنها ناشی میشود:
مزایا:
- دقت بالا و گشتاور زیاد:
به دلیل فیدبک انکودر، سروو موتورها قابلیت تکرارپذیری و حفظ موقعیت را در کسری از درجه دارند و میتوانند گشتاور کامل خود را در طیف وسیعی از سرعتها حفظ نمایند. - عملکرد نرم و سرعت کنترلشده:
الگوریتمهای پیشرفته درایو، شتابگیری و کاهش سرعت بسیار نرمی را فراهم میکنند که لرزش را کاهش داده و برای سیستمهای مکانیکی حساس مناسب است. - ایمنی در برابر خطای گام:
سروو سیستمها همیشه از موقعیت واقعی آگاه هستند و در صورت بار بیش از حد، خطا میدهند اما هرگز گام گم نمیکنند.
محدودیت ها و معایب:
- هزینه بالا: سروو سیستمها به دلیل درایور و انکودر پیچیده، به طور قابل توجهی گرانتر از موتورهای استاندارد هستند.
- نیاز به درایور خاص و تنظیمات تخصصی: راهاندازی و بهینهسازی (Tuning) سروو موتور برای دستیابی به عملکرد مطلوب نیازمند دانش فنی و زمان برای تنظیم پارامترهای PID است.
- حساس به نویز: به دلیل اتکای کامل به سیگنالهای فیدبک با وضوح بالا، سروو موتورها به نویز الکترومغناطیسی و تداخلات محیطی حساس هستند. فروش سیم و کابل شیلد شده و نصب استاندارد برای غلبه بر این حساسیت ضروری است.
نحوه کنترل سروو موتور
کنترل سروو موتور، فرآیند فرماندهی به درایو برای هدایت موقعیت، سرعت یا گشتاور موتور به مقادیر برنامهریزی شده است که عمدتاً از طریق دو روش اصلی انجام میشود. روشهای کنترل در صنعت و نمونهسازی:
- کنترل با PLC: در اتوماسیون صنعتی، PLCها از طریق ماژولهای تخصصی کنترل حرکت، دنبالهای از پالسها یا سیگنالهای ارتباطی پیشرفته را تولید میکنند که پروفایلهای حرکت مورد نظر (مانند کنترل موقعیت یا سرعت) را به درایور سروو ارسال مینمایند.
- کنترل با آردوینو و میکروکنترلر: برای کاربردهای کوچک و نمونهسازی، میکروکنترلرها میتوانند مستقیماً سروو موتورهای کوچک DC (سرووهای RC) را با تولید سیگنال PWM (مدولاسیون پهنای پالس) کنترل کنند. پهنای پالس در این روش، زاویه هدف سروو را تعیین میکند.
- مفهوم PWM در سروو موتور: PWM در سرووهای کوچک برای تعیین زاویه هدف استفاده میشود و در درایورهای سروو صنعتی، از PWM با فرکانس بالا برای تولید شکل موجهای ولتاژ استفاده میشود که جریان و گشتاور اعمالی به موتور را با دقت کنترل میکند.
سروو موتور در سیستمهای اتوماسیون صنعتی
سروو موتورها فراتر از یک عملگر، به عنوان عناصر هوشمند در خطوط تولید و کارخانههای هوشمند عمل میکنند و انعطافپذیری و دقت لازم برای تولید پیشرفته را فراهم میآورند. نقش محوری سروو موتورها در تولید مدرن:
نقش سروو موتور در خط تولید هوشمند:
سروو موتورها امکان تغییر سریع پارامترهای حرکت (مانند طول برش یا اندازه بستهبندی) را بدون نیاز به تغییرات مکانیکی فراهم میکنند. همچنین درایورهای سروو، دادههای حیاتی عملیاتی مانند گشتاور و دما را برای تحلیلهای پیشبینیکننده خطا جمعآوری و به سیستمهای مدیریت تولید منتقل مینمایند.
هماهنگی بین سروو موتور و سنسورها:
عملکرد سروو به شدت به دادههای ورودی از سنسورها (مانند سنسورهای دید ماشینی) وابسته است. کنترلر بر اساس اطلاعات سنسور، دستورات موقعیتیابی دقیق را به سروو میدهد تا عملیات پیچیده مانند جابجایی قطعات با موقعیت نامنظم با موفقیت انجام شود.
مفهوم همزمان سازی چند محور یا Multi-Axis Control:
این مفهوم به معنای کنترل دو یا چند سروو موتور به صورت هماهنگ و با دقت زمانی بسیار بالا است. این هماهنگی که اساس کار دستگاههای CNC و رباتیک پیشرفته است، از طریق شبکههای ارتباطی پرسرعت صنعتی مانند EtherCAT محقق میشود.
مشکلات رایج در سروو موتور و روش رفع آن
درایورهای سروو، به دلیل پیچیدگی خود و اتکایشان به فیدبک، میتوانند مستعد مشکلاتی باشند. عیبیابی صحیح و سریع این مشکلات برای حفظ کارایی سیستم اتوماسیون ضروری است. رایجترین مشکلات و راهکارهای مقابله با آنها:
- نویز در سیستم فیدبک:
نویز الکتریکی میتواند سیگنالهای انکودر را مختل کند و باعث حرکت ناپایدار یا خطای موقعیتیابی شود. راهحل شامل استفاده از کابلهای شیلد شده، ارتینگ صحیح و جداسازی مسیر کابلهای سیگنال از کابلهای قدرت است. - خطای انکودر:
خرابی فیزیکی انکودر، قطع کابل یا کثیف شدن دیسک انکودرهای نوری، منجر به توقف سیستم میشود. راهحل شامل بررسی سلامت کابل و اتصالات، بررسی کد خطای درایو، و در صورت لزوم تعویض انکودر یا تمیزکاری آن است. - لرزش در بارهای ناهمگن:
لرزش یا نوسان موتور (Hunting) اغلب ناشی از تنظیمات نادرست پارامترهای کنترل (PID) برای بار سیستم یا وجود لقی در بخش مکانیکی است. راهحل شامل بهینهسازی تنظیمات PID، استفاده از قابلیت خود-تیونینگ و بررسی و رفع لقی در گیربکسها است. - خطاهای رایج در تنظیمات درایو:
خطاهایی مانند ولتاژ بیش از حد DC باس یا اضافه جریان. راهحل شامل بررسی مقاومت ترمز، تهویه مناسب و اطمینان از عدم بارگذاری بیش از حد موتور است. فروش تجهیزات الکترونیکی و درایوهای سروو با قابلیتهای عیبیابی پیشرفته، کمک شایانی به رفع سریع این خطاها میکنند.

مشخصات فنی سروو موتورهای پرکاربرد
این جدول مشخصات فنی کلیدی سروو موتورهای صنعتی از برندهای معتبر را برای مقایسه و انتخاب آسانتر فراهم میآورد.
| برند | توان (kW) | ولتاژ (VAC) | گشتاور دائم (Nm) | گشتاور لحظهای (Nm) | حداکثر سرعت (RPM) | نوع کنترل |
| یاسکاوا | ۰.۴ | ۲۰۰-۲۳۰ | ۱.۲۷ | ۳.۸۲ | ۶۰۰۰ | کنترل موقعیت، سرعت، گشتاور |
| زیمنس | ۱.۰ | ۴۰۰-۴۸۰ | ۳.۲ | ۹.۶ | ۴۵۰۰ | کنترل موقعیت (Profibus/Profinet) |
| میتسوبیشی | ۲.۰ | ۲۰۰-۲۴۰ | ۶.۴ | ۱۹.۲ | ۳۰۰۰ | کنترل موقعیت، گشتاور، سرعت |
| دلتا | ۰.۷۵ | ۳۸۰-۴۴۰ | ۲.۴ | ۷.۱۶ | ۵۰۰۰ | کنترل موقعیت (پالس/جهت) |
تاثیر نوع کوپلینگ و گیربکس در دقت سروو موتور
اجزای مکانیکی میانی، نقشی کلیدی در انتقال حرکت سروو موتور به بار و حفظ دقت نهایی سیستم ایفا میکنند. کوپلینگها و گیربکسها باید با حداقل لقی انتخاب شوند تا عملکرد موتور به درستی منعکس شود. کوپلینگ چیست؟ یک قطعه مهندسی شده برای انتقال نیرو به صورت افقی است.
- تاثیر نوع کوپلینگ: کوپلینگ وظیفه اتصال شفت موتور به شفت بار یا گیربکس را دارد. استفاده از کوپلینگهای انعطافپذیر با لقی نزدیک به صفر مانند انواع دیافراگمی، ضروری است. کوپلینگ نامناسب میتواند ناهمراستایی را به شفت موتور منتقل کند که منجر به لرزش، خطای انکودر و کاهش عمر بلبرینگ میشود.
- تاثیر نوع گیربکس: گیربکس برای تطبیق گشتاور و سرعت موتور با نیاز بار استفاده میشود. مهمترین عامل در کاهش دقت، لقی (Backlash) گیربکس است. برای سروو سیستمهای دقیق، استفاده از گیربکسهای خورشیدی با لقی بسیار پایین یا گیربکسهای هارمونیک درایو الزامی است. گیربکس همچنین به صورت موثری اینرسی بار را کاهش داده و پاسخ دینامیکی سیستم را بهبود میبخشد.
البته دریافت بهترین نتیجه از این موتور، به کیفیت قطعات برق و الکترونیک و هماهنگی درست آنها با موتور هم بستگی دارد.
تاثیر دما و نویز الکترومغناطیسی بر عملکرد سروو موتور
محیط کاری سروو موتور میتواند به طور مستقیم بر پایداری و طول عمر آن تأثیر بگذارد. کنترل دما و مدیریت نویز از جمله اقدامات اساسی در نصب سروو سیستمها محسوب میشود.
1. تاثیر دما:
دمای بیش از حد میتواند طول عمر عایق سیمپیچها را کاهش دهد و در موتورهای مگنت دائم باعث دمگنت شدن آهنرباها شود که کاهش دائمی گشتاور را در پی دارد. تغییرات دمایی همچنین بر دقت و پایداری انکودر تأثیر میگذارد. راهحلها شامل استفاده از سیستمهای خنککننده در موتورها و تهویه مناسب در تابلو برق برای درایو است.
2. تاثیر نویز الکترومغناطیسی (EMI):
نویز تولید شده توسط سوئیچینگهای درایو و تجهیزات صنعتی، میتواند سیگنالهای انکودر را مختل کند و باعث خطای موقعیتیابی یا نوسان شود. راهحلها شامل استفاده از کابلهای شیلد شده، ارتینگ صحیح، و جداسازی مسیر کابلهای سیگنال از قدرت است. خرید تجهیزات برق صنعتی استاندارد و نصب صحیح آنها ضروری است.
خطاهای رایج در سروو موتور
| خطای رایج | شرح خطا | علت اصلی | راهکار |
| Overshoot / Undershoot | عبور موتور از موقعیت هدف یا عدم رسیدن کامل به آن. | تنظیمات نامناسب پارامترهای PID، لقی مکانیکی، یا پروفایل حرکت نامناسب. | تنظیم دقیق پارامترهای PID، کاهش لقی مکانیکی. |
| Excessive Follow Error | خطای دنبالهروی بیش از حد. درایو نمیتواند موقعیت واقعی را به دستوری نزدیک کند. | بار بیش از حد موتور، گشتاور ناکافی، تنظیمات نامناسب Gain، یا اختلال در فیدبک. | بررسی تناسب موتور با بار، افزایش بهره حلقه کنترل موقعیت و بررسی انکودر. |
| Vibration at Standstill | لرزش موتور در حالت سکون یا سرعت پایین. | تیونینگ تهاجمی حلقه کنترل، نویز در انکودر، یا فرکانس تشدید مکانیکی. | کاهش بهرههای PID، استفاده از فیلترهای Notch در درایو. |
سخن آخر
سروو موتورها به عنوان عناصر اصلی در تحقق اهداف اتوماسیون پیشرفته، نقش غیرقابل انکاری در افزایش دقت، سرعت و بهرهوری فرآیندهای صنعتی دارند. سیستمهای سروو با ترکیب یک موتور الکتریکی قدرتمند و یک حلقه کنترل هوشمند مبتنی بر فیدبک، توانستهاند محدودیتهای موتورهای سنتی را در زمینههای حساس به موقعیت پشت سر بگذارند.
درک دقیق تفاوتهای عملکردی انواع سروو موتور و همچنین آشنایی با چالشهای فنی آنها، از جمله تنظیمات پیچیده، حساسیت به نویز و تأثیر عوامل مکانیکی مانند گیربکس، برای هر متخصصی که قصد طراحی یا نگهداری سیستمهای اتوماسیون را دارد، ضروری است. با توجه به حرکت پرشتاب صنایع به سمت هوشمندسازی، سرمایهگذاری در دانش فنی مربوط به سروو سیستمها، یک ضرورت استراتژیک محسوب میشود. در این راستا، سامانههای معتبری مانند سامانه دریچه تجارت میتوانند مرجع مناسبی برای تأمین تجهیزات و اطلاعات تخصصی مرتبط باشند.
شماره تماس استعلام قیمت: 02192005590
سؤالات متداول
سروو موتور چگونه میتواند موقعیت خود را حتی در برابر بارهای ناگهانی و سنگین حفظ کند؟
این توانایی مدیون مکانیزم کنترل حلقه بسته سروو موتور است. انکودر موقعیت واقعی را اندازهگیری کرده و انحراف ناشی از بار را فوراً به درایور گزارش میدهد. درایور به محض تشخیص این خطا، به سرعت جریان اعمالی به سیمپیچها را افزایش داده و در نتیجه، گشتاور خروجی موتور را بالا میبرد. این افزایش سریع گشتاور جبرانی، نیروی کافی برای غلبه بر بار و بازگرداندن دقیق روتور به موقعیت دستوری را فراهم میکند و پایداری سیستم را تضمین مینماید.
مفهوم ‘تیونینگ’ در سروو موتور به چه معناست و چرا تنظیم صحیح پارامترهای PID تا این حد حیاتی است؟
تیونینگ (Tuning) به معنای بهینهسازی ضرایب کنترلی حلقه بسته درایور سروو، به ویژه پارامترهای PID تناسبی، انتگرالی، مشتقی است. این فرآیند حیاتی است زیرا تعادلی میان سرعت پاسخگویی موتور به دستورات و پایداری آن در برابر نوسانات ایجاد میکند. تنظیم نادرست این ضرایب میتواند منجر به لرزش شدید موتور، نوسان دائمی حول موقعیت هدف (Hunting) یا پاسخگویی کند شود. در واقع، تیونینگ موفق، حداکثر دقت و کارایی را از سیستم استخراج میکند.
سروو موتورهای خطی چه مزیت برجستهای نسبت به ترکیب سروو دورانی و بال اسکرو دارند و در چه صنایعی کاربرد انحصاری پیدا کردهاند؟
مزیت برجسته سروو موتورهای خطی، حذف کامل واسطههای مکانیکی انتقال حرکت (مانند بال اسکرو) است. این حذف منجر به لقی صفر (Zero Backlash) و در نتیجه دقت بینظیری در حد میکرون و دینامیک فوقالعاده (شتاب و سرعت بسیار بالا) میشود. به دلیل این ویژگیها، سرووهای خطی کاربرد انحصاری در صنایعی پیدا کردهاند که به بالاترین سطح دقت و سرعت همزمان نیاز دارند، مانند مونتاژ تراشههای نیمههادی، سیستمهای اندازهگیری دقیق (CMM) و برشهای لیزری فوقدقیق.